
Tutorial 14: Real-World Assets#
Objective: Learn how to use real-world scanned assets in simulation for sim-to-real transfer.
What you’ll learn:
Using EmbodiedGen generated assets
Converting assets between formats (URDF, USD, MJCF)
Setting up collision meshes
Asset compatibility across simulators
Prerequisites: Completed Tutorial 13: Teleoperation
Estimated time: 30 minutes
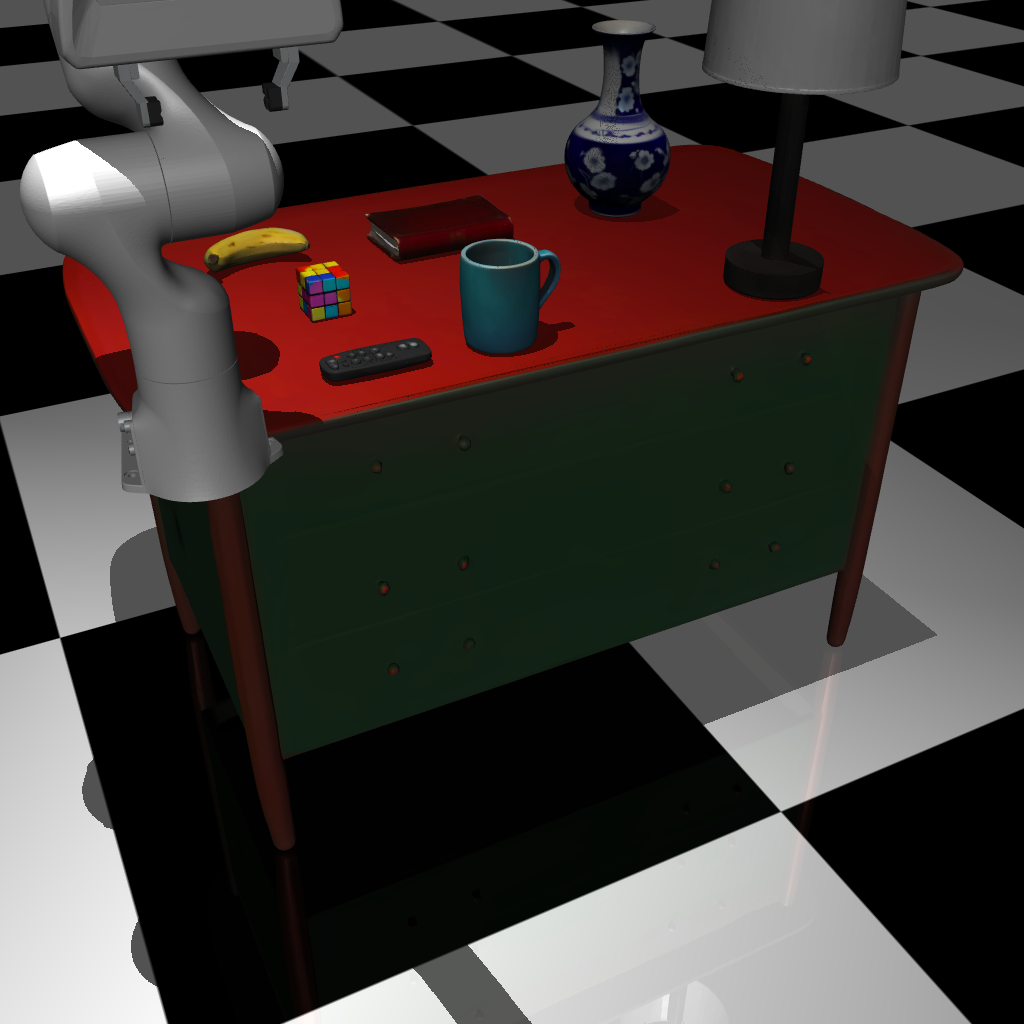
This tutorial shows how to use real assets generated from EmbodiedGen in MetaSim.
You can visited more all-simulator-ready assets in here.
You can generate any objects or scene assets you need, reference.
Common Usage#
python get_started/14_real_assets.py --sim <simulator>
In headless mode:
python get_started/14_real_assets.py --sim isaacsim --headless
python get_started/14_real_assets.py --sim isaacgym --headless
MUJOCO_GL=egl python get_started/14_real_assets.py --sim mujoco --headless
python get_started/14_real_assets.py --sim genesis --headless
python get_started/14_real_assets.py --sim sapien3 --headless
python get_started/14_real_assets.py --sim pybullet --headless
You will get the following image:#
Isaac Sim |
Isaac Gym |
Mujoco |
|---|---|---|
|
|
|


Genesis |
Sapien |
PyBullet |
|---|---|---|
|
|
|



Asset Converter#
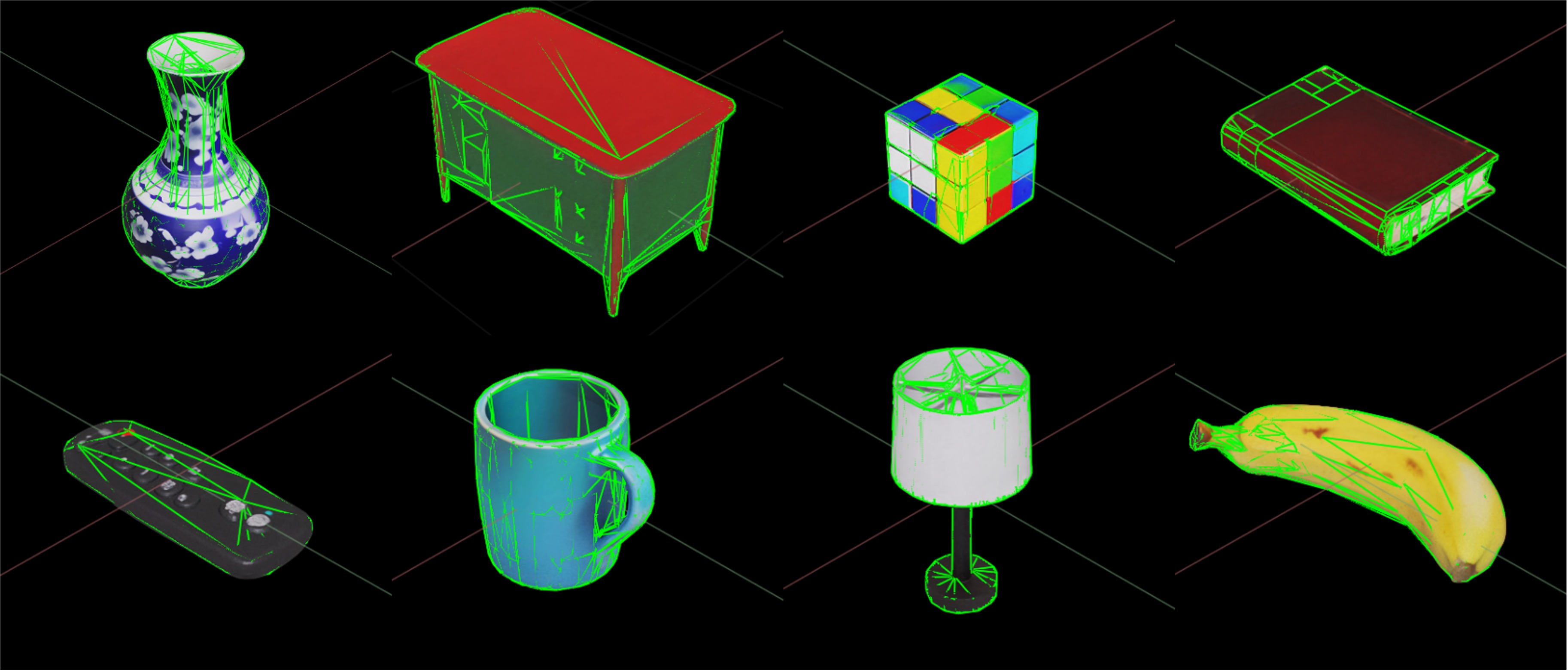
Use EmbodiedGen generated assets with correct physical collisions and consistent visual effects in MetaSim.
(isaacsim, mujoco, genesis, pybullet, isaacgym, sapien).
Example in generation/tests/test_asset_converter.py.
Simulator |
Conversion Class |
|---|---|
MeshtoUSDConverter |
|
MeshtoMJCFConverter |
|
EmbodiedGen generated .urdf can be used directly |
from huggingface_hub import snapshot_download
from generation.asset_converter import AssetConverterFactory, AssetType
data_dir = "roboverse_data/assets/EmbodiedGenData"
snapshot_download(
repo_id="HorizonRobotics/EmbodiedGenData",
repo_type="dataset",
local_dir=data_dir,
allow_patterns="demo_assets/*",
)
target_asset_type = AssetType.MJCF # or AssetType.USD
urdf_paths = [
f"{data_dir}/demo_assets/remote_control/result/remote_control.urdf",
]
if target_asset_type == AssetType.MJCF:
output_files = [
f"{data_dir}/demo_assets/remote_control/mjcf/remote_control.mjcf",
]
asset_converter = AssetConverterFactory.create(
target_type=AssetType.MJCF,
source_type=AssetType.URDF,
)
elif target_asset_type == AssetType.USD:
output_files = [
f"{data_dir}/demo_assets/remote_control/usd/remote_control.usd",
]
asset_converter = AssetConverterFactory.create(
target_type=AssetType.USD,
source_type=AssetType.MESH,
)
with asset_converter:
for urdf_path, output_file in zip(urdf_paths, output_files):
asset_converter.convert(urdf_path, output_file)