
0. Franka Planning#
Franka Planning Understanding#
Motion Planning is always challenging and complex to tune. Every time you want to plan a motion, you need to tune the rotation convention, the planning library, etc. We provide a simple tutorial to show you how to plan a motion for the Franka robot.
First, you need to install curobo. RoboVerse provides a clean readme to help you install the dependencies. Follow the link to install them!
Then run:
python get_started/motion_planning/0_franka_planning.py --sim <simulator>
Here is a visualization of how we plan the motion for the Franka robot:
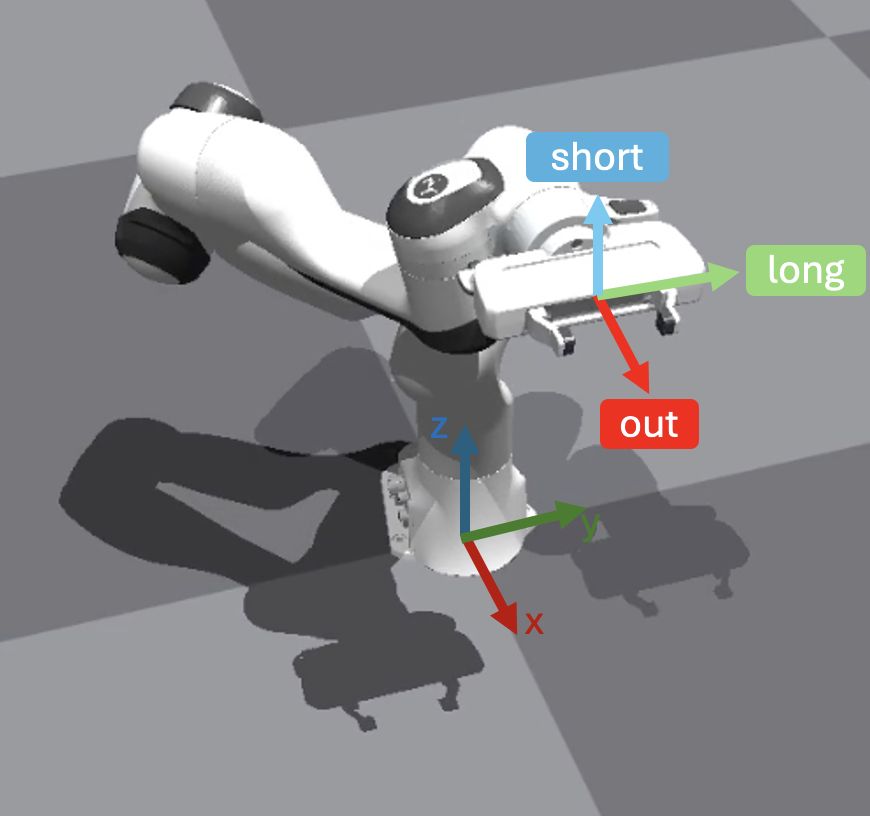
You will get the following videos:
Isaac Lab
Isaac Gym
Genesis