Adding New Robots#
1. Create a Robot Configuration File#
Define a new robot in metasim/cfg/robots/{robot_name}_cfg.py.
The definition of each term is explained in API Documentation.
The following terms are mandatory:
num_jointsactuatorsjoint_limits
The following terms should have at least one of the following, depending on the simulator you want to use:
usd_pathurdf_pathmjcf_pathmjx_mjcf_path
The following terms are needed if you want to use end-effector control:
ee_body_namegripper_open_qgripper_close_qcurobo_ref_cfg_namecurobo_tcp_rel_poscurobo_tcp_rel_rot
A good example is franka_cfg.py and h1_cfg.py, which are both well-tested.
Also, please import the robot configuration class in metasim/cfg/robots/__init__.py. Please make sure the robot class name is in camel case (e.g. FrankaPandaCfg).
2. Test the Reliability#
Run the following command to test the reliability of the robot:
python metasim/scripts/random_action.py --sim=${your_simulator} --robot=${robot_name}
Please make sure the robot_name is same as above. Either in camel case (e.g. --robot=FrankaPanda) or snake case (e.g. --robot=franka_panda).
If your robot doesn’t break apart and no error occurs during the test, it should be good to use!
3. Add the Robot to the RoboVerse Data Repository#
Add the robot to the RoboVerse data repository by a creating a PR. Please follow the data structure. We thank you for your contribution!
Tips#
1. Source of the Robot URDF/MJCF/USD#
For USD, Isaac Sim Assets provides good examples.
For MJCF, mujoco_menagerie is a reliable source.
2. Joint Names#
USD/URDF/MJCF usually define joint names in different ways. If you have multiple formats of a robot and you want to use the cross-simulation feature, please make sure the joint names are consistent.
To change the joint names in URDF/MJCF, directly edit the URDF/MJCF file with text editor.
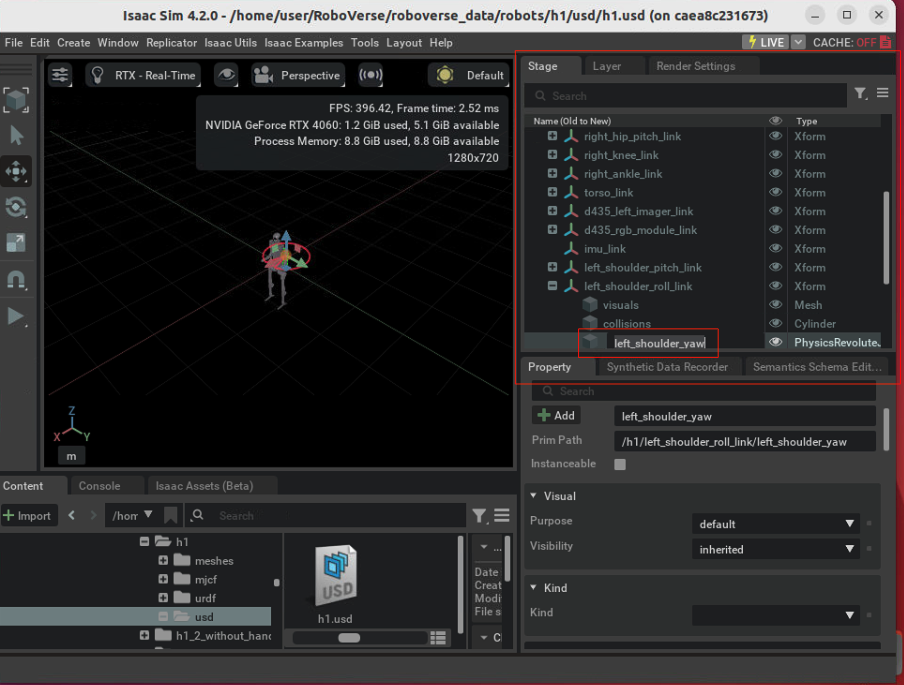
The change the joint names in USD, you need to open it in Isaac Sim (Isaac Lab) GUI, find the joint item in USD tree, and change the name by double-clicking the name.