
Migrating New Tasks#
This guide walks you through the full process of integrating a new task into RoboVerse, including trajectory preparation, asset conversion, configuration, and documentation.
📌 Overview#
To add a new task, you need to complete the following four components:
Trajectory — Prepare a demonstration file in the v2 format
Assets — Convert and organize USD assets
Configuration File — Write a task config class in Python
Docstring — Add structured documentation for your task
Each part is explained in detail below.
🔧 1. Collecting trajectories (Data Format v2)#
Create a .pkl file containing demonstration data in v2 format. Make sure the filename ends with _v2.pkl. The data format is:
{
"franka": [
{
"actions": [
{
"dof_pos_target": {"joint1": float, ...},
"ee_pose_target": {
"pos": [x, y, z],
"rot": [w, x, y, z],
"gripper_joint_pos": float
}
},
...
],
"init_state": {
"object1": {"pos": [...], "rot": [...]},
"robot": {"pos": [...], "rot": [...], "dof_pos": {...}},
...
},
"states": [state1, state2, ...],
"extra": None
},
...
],
...
}
Explanation:
The relationship between actions and states:
graph LR
init_state --> a0["actions[0]"] --> s0["states[0]"] --> a1["actions[1]"] --> s1["states[1]"] --> ... --> an["actions[n-1]"] --> sn["states[n-1]"]
len(actions) == len(states)Each object must be present in both
init_stateand everystatesentry.
Convert v1 to v2#
If your demonstrations were collected using the legacy v1 format, convert them to the new v2 format using:
python scripts/convert_traj_v1_to_v2.py --task CloseBox --robot franka
👉 For details about the v1 schema and field meanings, see Data Format v1 (Deprecated).
🧱 2. Preparing and Testing Assets#
To define a new task in RoboVerse, you must prepare simulation assets in USD, URDF, or MJCF format. This section explains how to organize and validate them.
Assets should be placed in the following structure:
./roboverse_data/assets/<benchmark_name>/<task_name>/
To organize simulation assets for a task, use the following folder structure:
roboverse_data/ └── assets/ └── <benchmark_name>/ └── <task_name>/ ├── obj1/ │ ├── usd/ │ │ └── obj1.usd │ ├── mjcf/ │ │ └── obj1.mjcf │ ├── urdf/ │ │ └── obj1.urdf │ └── textures/ # optional │ └── obj1_albedo.png ├── obj2/ │ ├── usd/ │ │ └── obj2.usd │ ├── mjcf/ │ │ └── obj2.mjcf │ ├── urdf/ │ │ └── obj2.urdf │ └── textures/ # optional │ └── obj2_albedo.jpg └── …
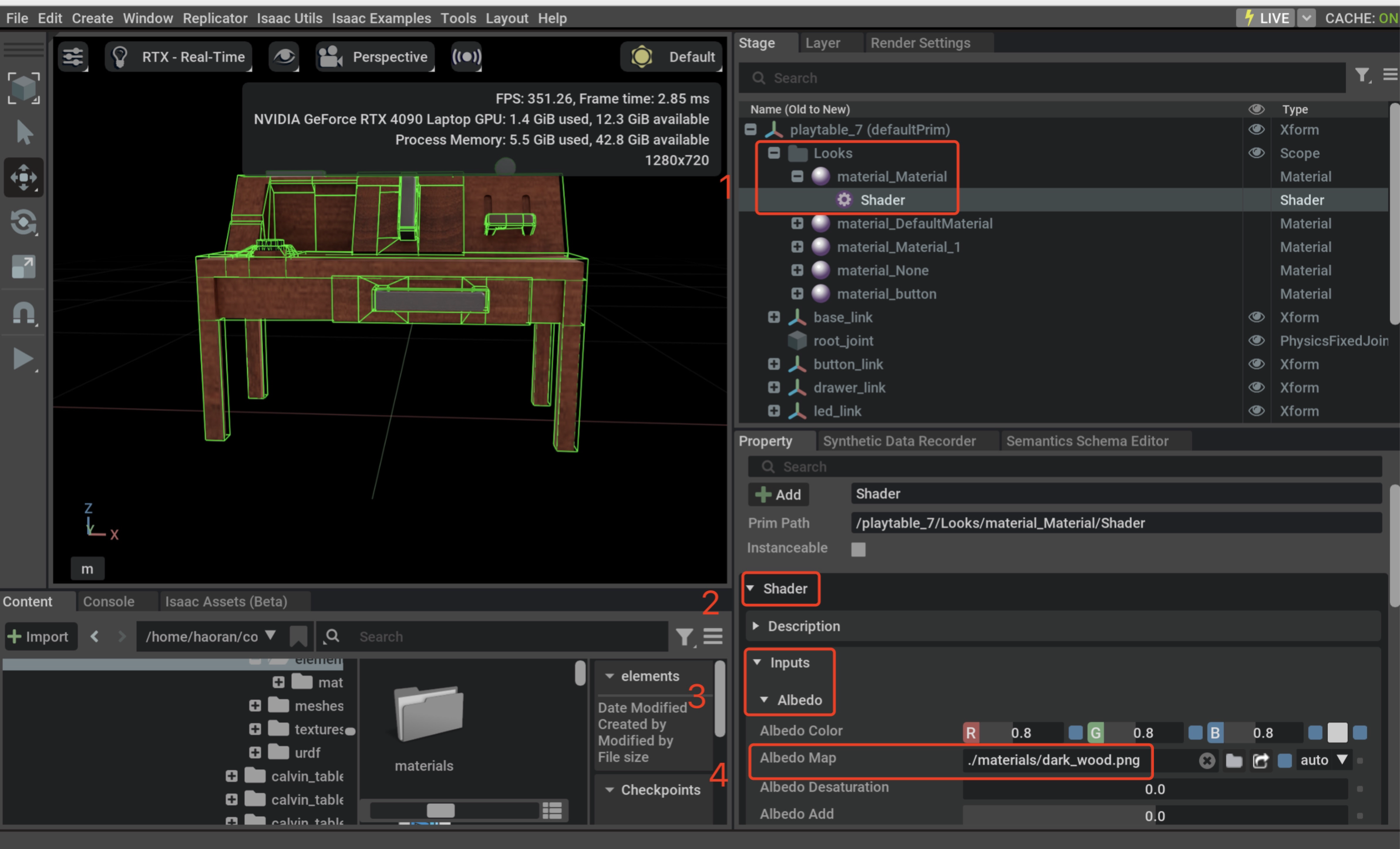
A. USD Assets#
Texture Guidelines#
Ensure that all bitmap texture paths (e.g., Albedo Maps) in your USD files are relative:
diffuse_texture = "./textures/my_texture.png" ✅
diffuse_texture = "/home/user/textures/my_texture.png" ❌
📚 See Omniverse Material Best Practices for texture guidelines.
🧪 Test USD Assets#
You can validate your .usd asset by running:
python scripts/test_usd.py --usd_path {your_usd_file}
By default, this loads the asset as a rigid object.
✅ The test script must run without errors.
If your asset passes validation but fails to load in RoboVerse, please open an issue.
B. URDF Assets (Coming Soon)#
C. MJCF Assets (Coming Soon)#
⚙️ 3. Write a Configuration File#
Create a new Python file under:
metasim/cfg/tasks/<benchmark_name>/<your_task>_cfg.py
It should define a task config class inheriting from BaseTaskCfg. Example:
from metasim.cfg.tasks.base_task_cfg import BaseTaskCfg
class PickCubeCfg(BaseTaskCfg):
task_name = "pick_cube"
# Define scene elements, reward, success, randomization, etc.
Register Your Task#
After creating the config file, you must register your task by importing the config class in the __init__.py file under the corresponding benchmark directory:
For example, in:
metasim/cfg/tasks/rlbench/__init__.py
Add a line like:
from .your_task_cfg import YourTaskCfg
📝 This ensures your task is included in the RoboVerse registry and can be loaded by name.
Without this, your task won’t be discoverable or runnable.
📄 4. Add a Structured Docstring#
Inside the task config file, write a docstring using the following format:
"""Pick up a red cube and move it to the goal.
.. Description::
### title:
pick_cube
### group:
maniskill
### description:
A simple pick-and-place task with a red cube and a fixed goal.
### randomizations:
- Cube XY position
- Goal Z height
### success:
- Cube within 2.5cm of goal
- Robot velocity < 0.2
### badges:
- demos
- sparse
### video_url:
pick_cube.mp4
### platforms:
isaaclab, mujoco
### notes:
Imported from ManiSkill and adapted to IsaacLab format.
"""
Field |
Description |
|---|---|
|
Unique task name (must match registered name) |
|
Source dataset or benchmark (e.g. Maniskill, CALVIN) |
|
What this task does, and why it exists |
|
List of randomized elements in the environment |
|
Conditions for task completion and success |
|
Tags like |
|
Link to original task documentation, if any |
|
Optional path to image or gif showing the task |
|
Path to a short demo video (e.g. |
|
List of simulators supported by this task (e.g. |
|
Implementation differences or internal comments for other developers |
ℹ️Note: This docstring format is required for correct indexing by RoboVerse. Improperly formatted docstrings will be ignored by the documentation system.
Also add your task to the documentation index:
docs/source/metasim/api/metasim/metasim.cfg.tasks.rst
If all four components are correctly implemented, you can move on to verify the task using replay_demo.py.
🔗 References#
The following resources may be useful when migrating existing datasets or assets into RoboVerse:
CALVIN Trajectories
GitHub: Fisher-Wang/calvin
Provides tools and examples to convert CALVIN demonstration trajectories.RLBench Asset Export
GitHub: Fisher-Wang/RLBench_export_assets
Scripts for exporting RLBench assets (URDF / USD) in a format compatible with RoboVerse and Isaac Sim.RLBench Trajectories
GitHub: Fisher-Wang/RLBench
Useful for converting RLBench demonstrations and behaviors into RoboVerse-compatible format.Data Format v1 (Deprecated)
Full reference for the legacy v1 demonstration format and conversion guidance.