
Migrating New Tasks#
Preparing assets#
Converting assets#
You need to convert the assets into usd files and put them under ./data_isaaclab/assets/<benchmark_name>/<task_name>.
Isaac Lab provides easy-to-use tools to convert urdf, mjcf, and mesh files into usd files, see here.
Specifically, if you are migrating from old version, please refer to scripts/convert_usd.py to ensure the new assets are compatible with the Isaac Lab standard.
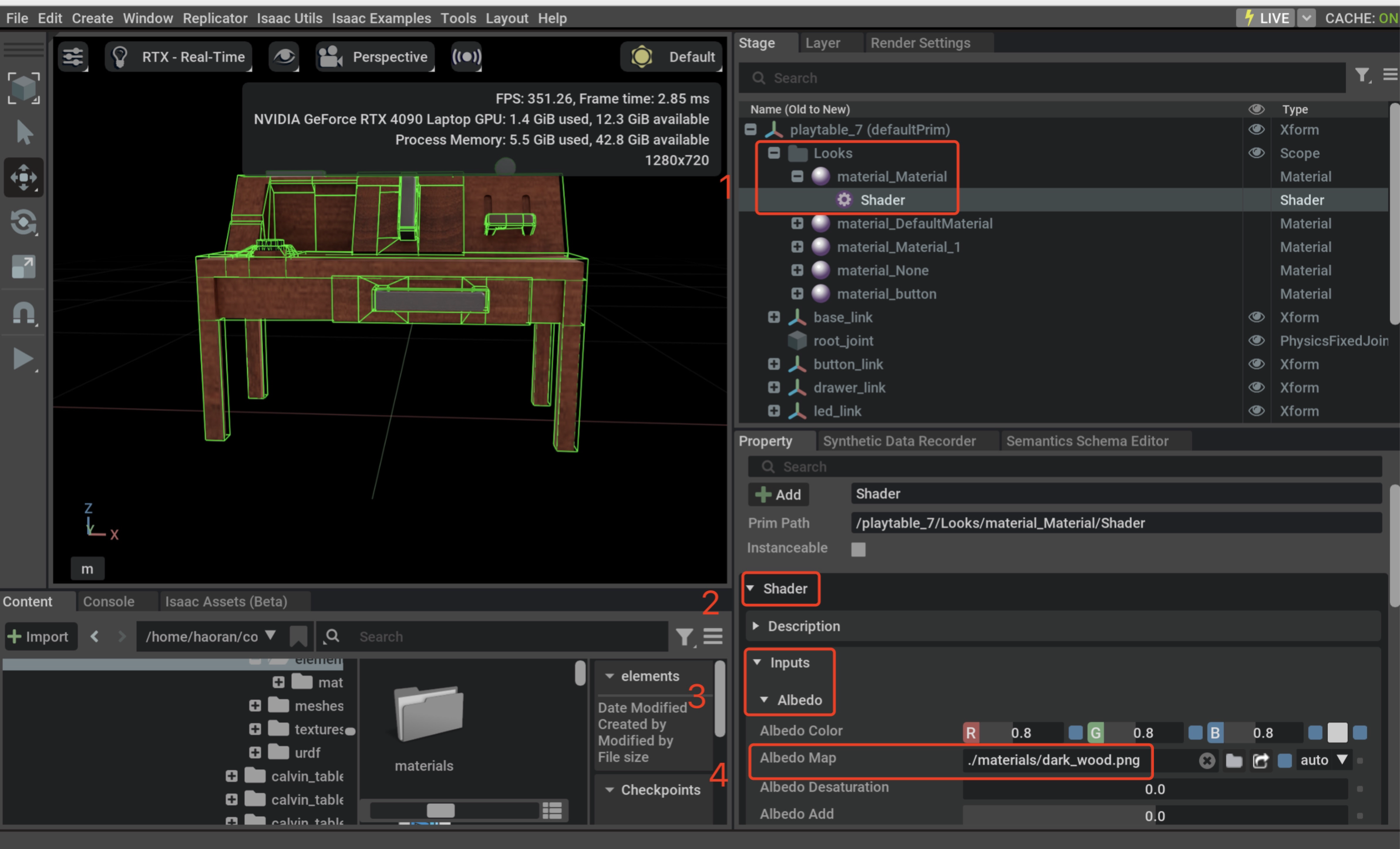
Assets textures#
Please make sure all the paths of the Albedo Map (and other bitmap textures) are relative path.
Please refer to Omniverse Materials Best Practices for more details.
Test assets#
You can use the following command to test the assets:
python scripts/test_usd.py --usd_path {your_usd_path}
By default, the usd will be loaded as Rigid Object.
For more usage, please run
python scripts/test_usd.py --help
Please make sure this script doesn’t give any error.
If the scripts doesn’t give any error, the assets look good, but still cannot be loaded in MetaSim framework, please report an issue.
Implementing tasks#
TODO
Collecting trajectories#
Prepare a .pkl file containing demonstration data. Use the following v2 data format:
Data format v2#
The file name should be ended with _v2.pkl. Once it is ended with _v2.pkl, the demo reader will automatically read it by v2 format.
The data format is:
{
"franka": [ // robot name should be same as BaseRobotMetaCfg.name
{
"actions": [
{
// one or more of the following
"dof_pos_target": {
"{joint_name1}": float,
"{joint_name2}": float,
...
},
"ee_pose_target": {
"pos": [float, float, float],
"rot": [float, float, float, float], // (w, x, y, z)
"gripper_joint_pos": float,
}
},
...
],
"init_state": {
"{obj_name1}": { // example rigid object
"pos": [float, float, float],
"rot": [float, float, float, float], // (w, x, y, z)
},
"{obj_name2}": { // example articulation object
"pos": [float, float, float],
"rot": [float, float, float, float], // (w, x, y, z)
"dof_pos": {
"{joint_name1}": float,
"{joint_name2}": float,
...
}
},
"{robot_name}": { // robot name should be same as BaseRobotMetaCfg.name
"pos": [float, float, float],
"rot": [float, float, float, float], // (w, x, y, z)
"dof_pos": {
"{joint_name1}": float,
"{joint_name2}": float,
...
}
},
...
},
"states": [state1, state2, ...] // list of states, a state has the same format as the init_state
"extra": None // extra information for specific use, default is None
},
...
],
...
}
Explaination:
The relationship between actions and states:
graph LR init_state --> a0["actions[0]"] --> s0["states[0]"] --> a1["actions[1]"] --> s1["states[1]"] --> ... --> an["actions[n-1]"] --> sn["states[n-1]"]len(actions) == len(states)Every object should have a key in the
init_stateandstatesdict.
Data format v1 (deprecated)#
The file name is typically trajectory-unified.pkl.
The data format is:
{
'source': 'ManiSkill2-rigid_body-PickSingleYCB-v0',
'max_episode_len': 147,
'demos': {
"franka": [
{
'name': 'banana_traj_0',
'description': 'Banana nana bana ba banana.', # optional
'env_setup': {
"init_q": [...], # [q_len], 9 for Franka
"init_robot_pos": [...], # [3]
"init_robot_quat": [...], # [4]
"init_{obj_name}_pos": [...], # [3]
"init_{obj_name}_quat": [...], # [4]
"init_{joint_name}_q": [...], # [1], for articulations
...
},
'robot_traj': {
"q": [[...], ...], # [demo_len x q_len]
"ee_act": [[...], ...], # [demo_len x 1] 0.0~1.0 0 for close and 1 for open
}
},
...
],
}
}
Explanation:
max_episode_len: The maximum length of the demo in this file. This is used to pad the trajectories so they can be stacked into a tensor for efficiency.robot_traj:q: Robot joint positionsee_act: End-effector actions
In each
env_setup:init_q: initial robot joint positionsinit_pos: initial robot positioninit_quat: initial robot rotation (quaterion)The other
init_*are used to initialize each environment, and what you save here could be retrived in the_reset_idxmethod of the task env. This usually includes the intial object position, rotation, scaling, joint positions, etc.
Convert v1 to v2#
If you have already exported the trajectory data in v1 format, you can convert it to v2 format by:
python scripts/convert_traj_v1_to_v2.py --task CloseBox --robot franka
Examples#
Docstrings#
Add your new tasks to docs/source/metasim/api/metasim/metasim.cfg.tasks.rst so that they can be indexed by the docs.