
MetaSim#
MetaSim is the standalone core simulation framework used by RoboVerse, providing a unified interface for robotic simulation across multiple physics engines.
Overview#
MetaSim enables you to:
Write Once, Run Anywhere: Develop simulation code that works across multiple simulators
Configure Declaratively: Define robots, scenes, cameras, and physics parameters through a configuration system
Scale: Run parallel environments
Extend: Add new robots, tasks, and simulators through defined interfaces
Core Concepts#
Concept |
Description |
|---|---|
Handler |
Simulator-specific backend that manages physics and rendering |
Scenario |
Complete scene specification (robots, objects, cameras, lights) |
Task |
Gym-style environment with reward functions and success criteria |
State |
Unified representation of simulation state across all backends |
Config |
Type-safe configuration classes for all components |
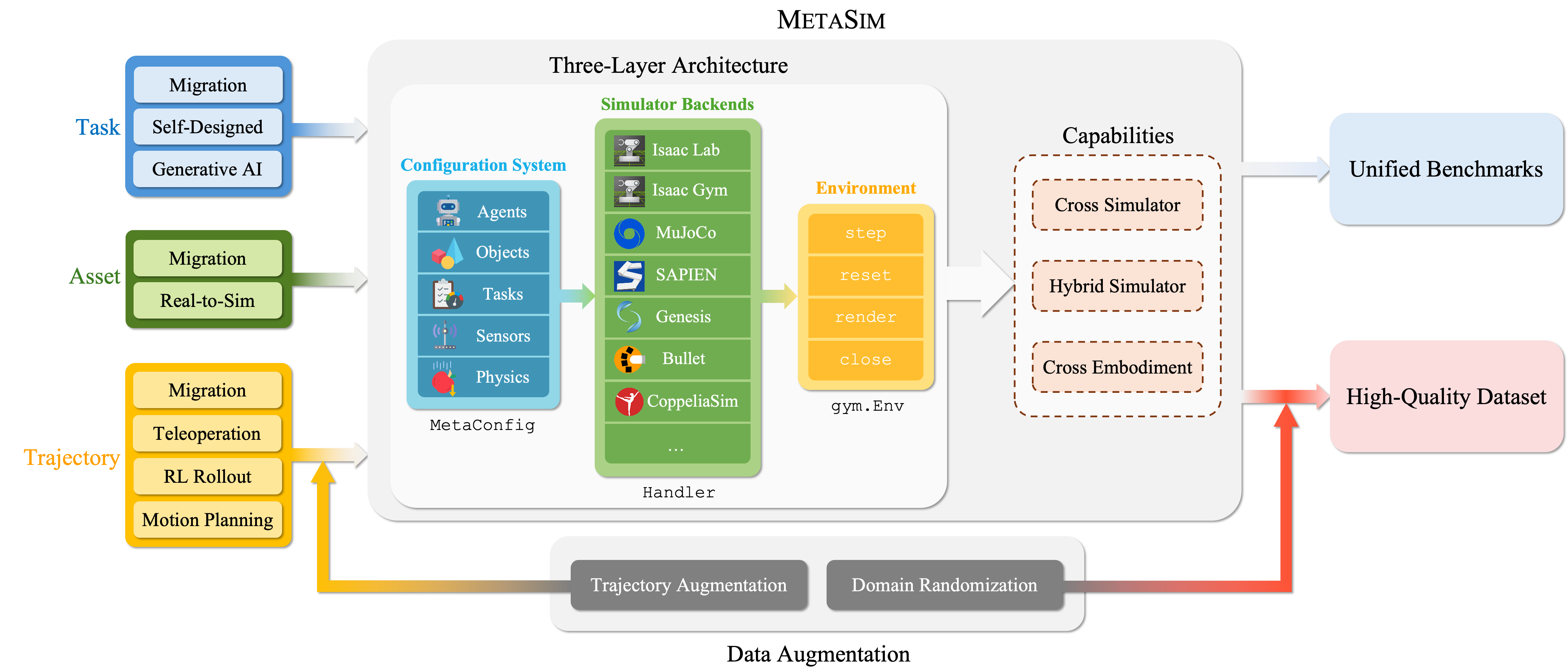
Architecture Diagram#
┌──────────────────────────────────────────────────────────────┐
│ Your Training Code │
├──────────────────────────────────────────────────────────────┤
│ Task Environment (Gym API) │
│ reset() / step() / render() / close() │
├──────────────────────────────────────────────────────────────┤
│ Domain Randomization │
│ Physics / Visual / Sensor / Action Noise │
├──────────────────────────────────────────────────────────────┤
│ Scenario Config │
│ Robots + Objects + Cameras + Lights │
├──────────────────────────────────────────────────────────────┤
│ Simulator Handler │
│ MuJoCo │ Isaac Sim │ SAPIEN │ PyBullet │ Genesis │ ... │
└──────────────────────────────────────────────────────────────┘
Table of Contents#
Installation
Getting Started
Concepts
Development Guide
API Reference